8.1 路径寻路(代码在mypath包下)
在使用 GDX-AI 进行路径寻路时,我们通常需要使用 Graph 接口和相关类,如 Node 和 Connection。下面是一个简单的示例,演示如何在 Java 中使用 GDX-AI 来实现路径寻路。
首先,确保你已在项目中添加了 GDX-AI 的依赖库。如果你使用的是 Gradle,你可以在 build.gradle 文件中添加以下依赖:
implementation ‘com.badlogicgames.gdx:gdx-ai:1.8.2’
示例 Java 代码
import com.badlogic.gdx.ai.pfa.Connection;
import com.badlogic.gdx.ai.pfa.DefaultGraphPath;
import com.badlogic.gdx.ai.pfa.Graph;
import com.badlogic.gdx.ai.pfa.IndexedGraph;
import com.badlogic.gdx.ai.pfa.PathFinderRequest;
import com.badlogic.gdx.ai.pfa.PathSmoother;
import com.badlogic.gdx.ai.pfa.PathSmootherRequest;
import com.badlogic.gdx.ai.pfa.SmoothableGraphPath;
import com.badlogic.gdx.ai.pfa.SmoothableGraphPath.NodeWithPosition;
import com.badlogic.gdx.ai.pfa.Smoother;
import com.badlogic.gdx.ai.pfa.Heuristic;
import com.badlogic.gdx.ai.pfa.indexed.IndexedAStarPathFinder;
import com.badlogic.gdx.ai.pfa.indexed.IndexedGraph;
import com.badlogic.gdx.utils.Array;
class Node {
int index;
float x, y;
public Node(int index, float x, float y) {
this.index = index;
this.x = x;
this.y = y;
}
}
class MapGraph implements IndexedGraph<Node> {
Array<Node> nodes = new Array<>();
Array<Connection<Node>> connections = new Array<>();
@Override
public int getIndex(Node node) {
return node.index;
}
@Override
public int getNodeCount() {
return nodes.size;
}
@Override
public Array<Connection<Node>> getConnections(Node fromNode) {
return connections; // Simplified for example purposes
}
}
class LocationHeuristic implements Heuristic<Node> {
@Override
public float estimate(Node node, Node endNode) {
return Math.abs(node.x - endNode.x) + Math.abs(node.y - endNode.y);
}
}
public class PathFindingExample {
public static void main(String[] args) {
MapGraph graph = new MapGraph();
Node startNode = new Node(0, 0, 0);
Node goalNode = new Node(1, 10, 10);
graph.nodes.add(startNode);
graph.nodes.add(goalNode);
Connection<Node> connection = new Connection<>() {
@Override
public float getCost() {
return 1; // Same cost for simplicity
}
@Override
public Node getFromNode() {
return startNode;
}
@Override
public Node getToNode() {
return goalNode;
}
};
graph.connections.add(connection);
IndexedAStarPathFinder<Node> pathFinder = new IndexedAStarPathFinder<>(graph);
DefaultGraphPath<Node> path = new DefaultGraphPath<>();
pathFinder.searchNodePath(startNode, goalNode, new LocationHeuristic(), path);
for (Node node : path) {
System.out.println("Node: " + node.index);
}
}
}
说明
Node 类: 表示图中的节点,并包括索引和位置。
MapGraph 类: 实现了 IndexedGraph 接口,负责管理节点和连接。
LocationHeuristic 类: 实现了 Heuristic 接口,用于估计从一个节点到另一个节点的距离。
Main 函数: 创建一个简单的图并在其中进行路径规划。
我的理解(项目LibgdxTest的wayFinding包下):首先定义节点Node,其次画图GridGraph去实现IndexedGraph<Node>用于表示图(Graph)结构,它允许图算法(如 A* 搜索)在任意节点上进行操作。实现 IndexedGraph 的类需要提供图中节点的相关信息和连接关系,以便算法可以执行路径查找等操作,在然后定义一个类PathFinderExample,去实现路径查找功能,路径查找所需要的三个属性
private GridGraph gridGraph;
private IndexedAStarPathFinder<Node> pathFinder;
private Heuristic<Node> heuristic;
第一个图,可以对任意一个节点进行操作的一个类,第二个A*Start路径查找的查找器,第三个启发式函数,如果是曼哈顿距离则是获得最小路径的一个因子
public PathFinderExample(GridGraph gridGraph) {
this.gridGraph = gridGraph;
this.pathFinder = new IndexedAStarPathFinder<>(gridGraph);
// 使用曼哈顿距离作为启发式函数,可以更换为其他合适的启发式算法
this.heuristic = (node, endNode) -> Math.abs(node.x - endNode.x) + Math.abs(node.y - endNode.y);
}
public GraphPath<Node> findPath(Node startNode, Node endNode) {
GraphPath<Node> path = new DefaultGraphPath<>();
pathFinder.searchNodePath(startNode, endNode, heuristic, path);
return path;
}
第一个赋值,第二个查询方法,直接调用DefaultGraphPath的searchNodePath方法即可
返回的path应该就是最佳路径的新图,之后,咱们就可以用个for循环去取出node节点即可
for (Node node : path) {
shapeRenderer.rect(node.x * CELL_SIZE, node.y * CELL_SIZE, CELL_SIZE, CELL_SIZE);
}
那个大家直接看第二个图就行了,第一个项目我觉得演示的不是很好
运行结果如下:
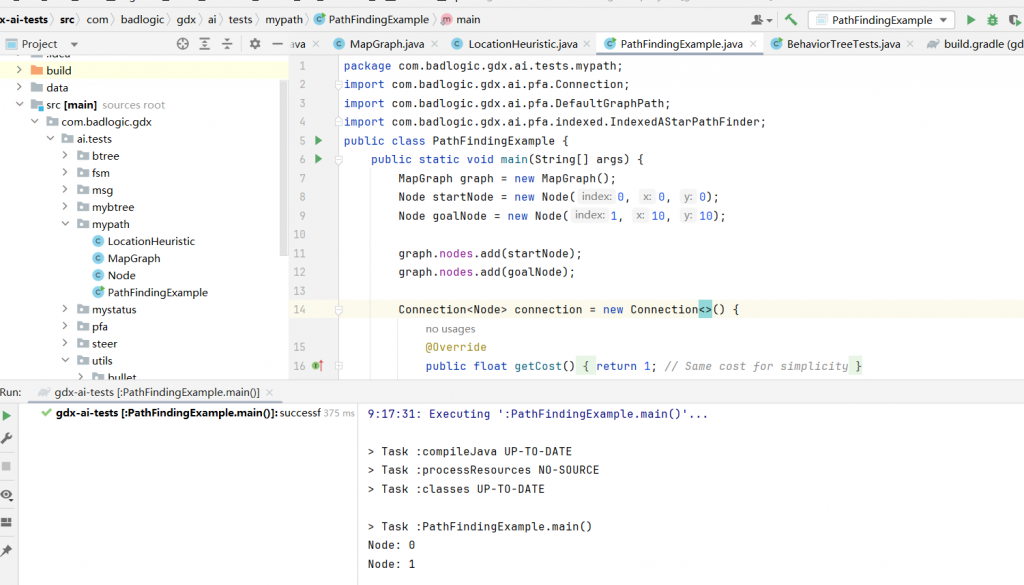
我来解释一下, pathFinder.searchNodePath(startNode, goalNode, new LocationHeuristic(), path);就是startNode节点到goalNode节点经过的节点
我在项目中加了一个更复杂的代码,可以更加展示这种效果,另外LibgdxTest里面的wayFinding包里面的项目也更加显示的演示了这种A*寻路方式
运行结果:
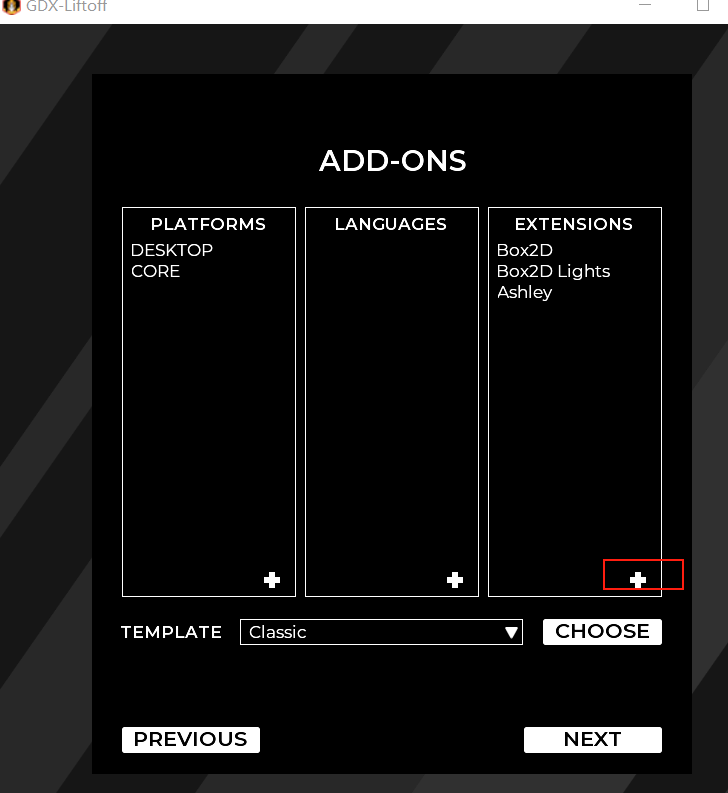
8.2 AI行为树(代码在mybtree包下)
准备工作
确保你已经将 gdx-ai 库添加到你的项目中。如果使用 Maven,可以在 pom.xml 中添加如下依赖:
<dependency>
<groupId>com.badlogicgames.gdx</groupId>
<artifactId>gdx-ai</artifactId>
<version>1.8.2</version>
</dependency>
示例代码
下面是完整的示例代码:
import com.badlogic.gdx.ai.btree.BehaviorTree;
import com.badlogic.gdx.ai.btree.LeafTask;
import com.badlogic.gdx.ai.btree.Task;
import com.badlogic.gdx.ai.btree.branch.Sequence;
import com.badlogic.gdx.ai.btree.decorator.Repeat;
import com.badlogic.gdx.ai.btree.leaf.Success;
import com.badlogic.gdx.ai.utils.random.ConstantIntegerDistribution;
// 定义角色类
class Character {
public void sayHello() {
System.out.println(“Hello! I am a character in this game.”);
}
}
// 自定义任务实现
class PrintHelloTask extends LeafTask<Character> {
@Override
public Status execute() {
Character character = getObject();
character.sayHello();
return Status.SUCCEEDED;
}
@Override
protected Task<Character> copyTo(Task<Character> task) {
return task;
}
}
// 主类
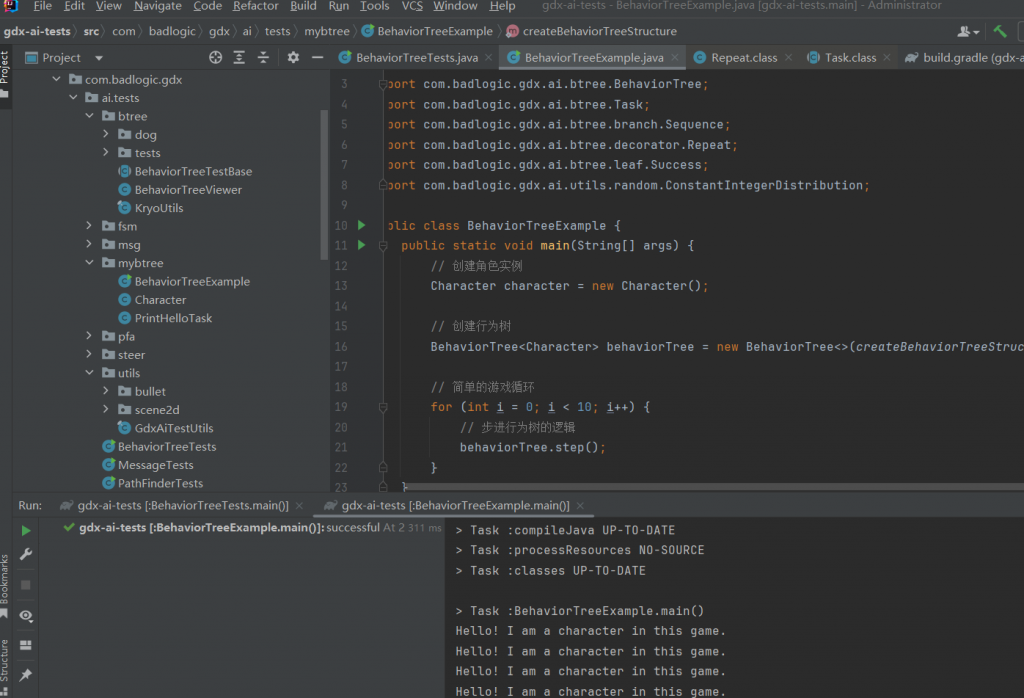
public class BehaviorTreeExample {
public static void main(String[] args) {
Character character = new Character();
BehaviorTree<Character> behaviorTree = new BehaviorTree<>(createBehaviorTreeStructure(), character);
for (int i = 0; i < 10; i++) {
behaviorTree.step();
}
}
private static Task<Character> createBehaviorTreeStructure() {
Sequence<Character> rootSequence = new Sequence<>();
// 使用 ConstantIntegerDistribution 来指定重复次数
rootSequence.addChild(new Repeat<>(new ConstantIntegerDistribution(1), new PrintHelloTask()));
rootSequence.addChild(new Success<Character>());
return rootSequence;
}
}
代码详解
- 定义角色类
Character 类是我们模拟的游戏角色,拥有一个简单的方法 sayHello,用于输出打招呼信息。
class Character {
public void sayHello() {
System.out.println(“Hello! I am a character in this game.”);
}
}
- 实现自定义任务
PrintHelloTask 是一个自定义的任务,继承自 LeafTask<Character>。它的主要逻辑是调用角色的 sayHello 方法。
class PrintHelloTask extends LeafTask<Character> {
@Override
public Status execute() {
Character character = getObject();
character.sayHello();
return Status.SUCCEEDED;
}
@Override
protected Task<Character> copyTo(Task<Character> task) {
return task;
}
}
- 主类与行为树创建
在 BehaviorTreeExample 中,我们创建了一个角色实例,以及一个行为树实例,随后运行一个简单的循环来执行行为树的逻辑。
public class BehaviorTreeExample {
public static void main(String[] args) {
Character character = new Character();
BehaviorTree<Character> behaviorTree = new BehaviorTree<>(createBehaviorTreeStructure(), character);
for (int i = 0; i < 10; i++) {
behaviorTree.step();
}
}
private static Task<Character> createBehaviorTreeStructure() {
Sequence<Character> rootSequence = new Sequence<>();
// 使用 ConstantIntegerDistribution 来指定重复次数
rootSequence.addChild(new Repeat<>(new ConstantIntegerDistribution(1), new PrintHelloTask()));
rootSequence.addChild(new Success<Character>());
return rootSequence;
}
}
- 行为树结构
在 createBehaviorTreeStructure 方法中,我们定义了行为树的结构。使用 Sequence 节点作为根节点,添加一个 Repeat 装饰器来控制 PrintHelloTask 的执行次数为 1 次。
private static Task<Character> createBehaviorTreeStructure() {
Sequence<Character> rootSequence = new Sequence<>();
rootSequence.addChild(new Repeat<>(new ConstantIntegerDistribution(1), new PrintHelloTask()));
rootSequence.addChild(new Success<Character>());
return rootSequence;
}
运行结果:
8.3 状态机,完整代码(代码在mystatus包下)
LibGDX 的 gdx-ai 库支持有限状态机(Finite State Machine, FSM)来管理对象的状态转换,这在游戏开发中广泛用于管理角色行为状态。下面是一个简单的 Java 示例,展示如何使用 gdx-ai 实现状态机并进行演示。
准备工作
确保你已经将 gdx-ai 库添加到你的项目中。如果使用 Maven,可以在 pom.xml 中添加如下依赖:
<dependency>
<groupId>com.badlogicgames.gdx</groupId>
<artifactId>gdx-ai</artifactId>
<version>1.8.2</version>
</dependency>
示例代码
以下是一个完整的实现状态机的 Java 示例代码:
import com.badlogic.gdx.ai.fsm.State;
import com.badlogic.gdx.ai.fsm.StateMachine;
import com.badlogic.gdx.ai.fsm.DefaultStateMachine;
import com.badlogic.gdx.ai.msg.Telegram;
class Character {
private StateMachine<Character, CharacterState> stateMachine;
public Character() {
stateMachine = new DefaultStateMachine<>(this, CharacterState.IDLE);
}
public void update() {
stateMachine.update();
}
public void changeState(CharacterState newState) {
stateMachine.changeState(newState);
}
public StateMachine<Character, CharacterState> getStateMachine() {
return stateMachine;
}
public void performAction(String action) {
System.out.println("Performing action: " + action);
}
}
enum CharacterState implements State<Character> {
IDLE {
@Override
public void update(Character character) {
System.out.println(“Character is idling…”);
}
},
WALKING {
@Override
public void enter(Character character) {
System.out.println(“Character starts walking.”);
}
@Override
public void update(Character character) {
character.performAction(“Walking”);
}
@Override
public void exit(Character character) {
System.out.println(“Character stops walking.”);
}
},
RUNNING {
@Override
public void enter(Character character) {
System.out.println(“Character starts running.”);
}
@Override
public void update(Character character) {
character.performAction(“Running”);
}
@Override
public void exit(Character character) {
System.out.println(“Character stops running.”);
}
};
@Override
public void enter(Character entity) {
}
@Override
public void update(Character entity) {
}
@Override
public void exit(Character entity) {
}
@Override
public boolean onMessage(Character entity, Telegram telegram) {
return false;
}
}
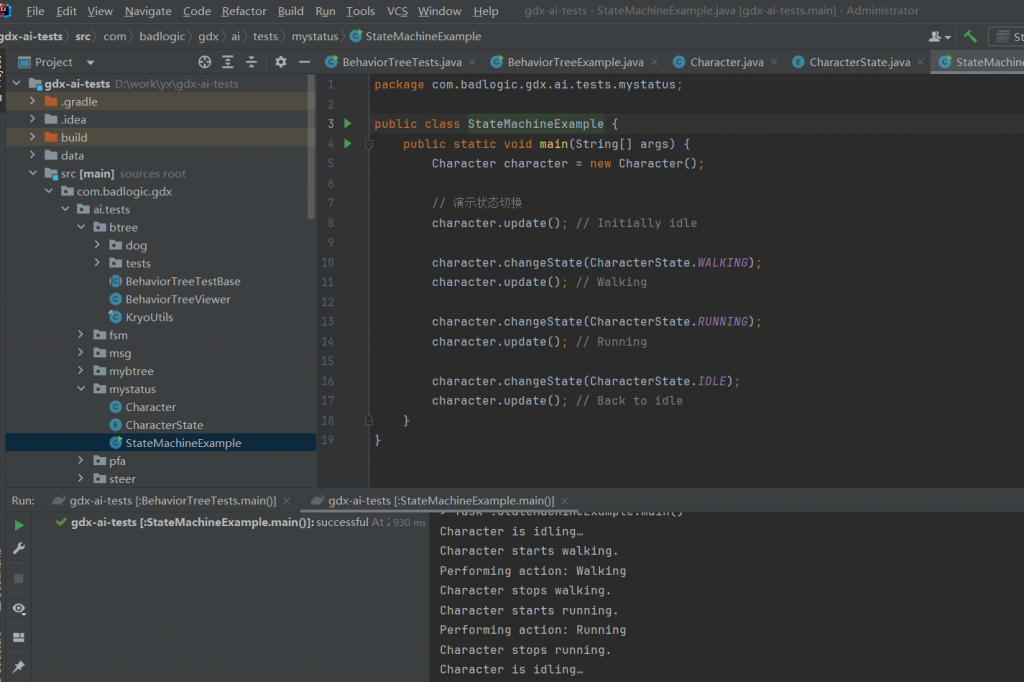
public class StateMachineExample {
public static void main(String[] args) {
Character character = new Character();
// 演示状态切换
character.update(); // Initially idle
character.changeState(CharacterState.WALKING);
character.update(); // Walking
character.changeState(CharacterState.RUNNING);
character.update(); // Running
character.changeState(CharacterState.IDLE);
character.update(); // Back to idle
}
}
代码解析
– Character 类: 角色类主要管理状态机并调用其更新和状态切换方法。
– CharacterState 枚举: 定义了角色的所有可能状态,包括 IDLE、WALKING 和 RUNNING,每个状态都实现了 State 接口,通过 enter、update 和 exit 方法来管理状态特定的行为和打印信息。
– StateMachineExample 类: 主类演示状态机的使用,通过角色实例管理状态并触发变化。
执行机制
- 初始化状态:在
Character的构造函数中初始化状态机,初始状态为IDLE。 - 状态更新:在
update()方法中调用当前状态的update行为。 - 状态切换:通过
changeState()方法切换角色的当前状态。
运行结果:
8.4 转向行为,完整代码(代码在LibgdxTest项目的core.game的steering包下的)
完整代码:
package com.mygdx.game.steering;
import com.badlogic.gdx.ai.steer.Steerable;
import com.badlogic.gdx.ai.steer.SteeringBehavior;
import com.badlogic.gdx.ai.steer.SteeringAcceleration;
import com.badlogic.gdx.ai.utils.Location;
import com.badlogic.gdx.graphics.Texture;
import com.badlogic.gdx.graphics.g2d.Sprite;
import com.badlogic.gdx.math.MathUtils;
import com.badlogic.gdx.math.Vector2;
public class SteeringActor extends Sprite implements Steerable<Vector2> {
private Vector2 position;
private Vector2 linearVelocity;
private float angularVelocity;
private float boundingRadius;
private boolean tagged;
private float maxLinearSpeed;
private float maxLinearAcceleration;
private float maxAngularSpeed;
private float maxAngularAcceleration;
private boolean independentFacing;
private SteeringBehavior<Vector2> steeringBehavior;
private SteeringAcceleration<Vector2> steeringOutput;
public SteeringActor(Texture texture) {
super(texture);
this.position = new Vector2(getX(), getY());
this.linearVelocity = new Vector2();
this.boundingRadius = Math.max(getWidth(), getHeight()) / 2;
this.steeringOutput = new SteeringAcceleration<>(new Vector2());
}
public SteeringActor(Texture texture, Vector2 initialPosition) {
this(texture);
this.position.set(initialPosition);
setPosition(initialPosition.x, initialPosition.y);
}
public void setSteeringBehavior(SteeringBehavior<Vector2> steeringBehavior) {
this.steeringBehavior = steeringBehavior;
}
public void applySteering(float deltaTime) {
if (steeringBehavior != null) {
steeringBehavior.calculateSteering(steeringOutput);
// Apply acceleration to velocity
linearVelocity.mulAdd(steeringOutput.linear, deltaTime).limit(getMaxLinearSpeed());
// Update position and angle
position.mulAdd(linearVelocity, deltaTime);
setPosition(position.x, position.y);
if (independentFacing) {
float newOrientation = vectorToAngle(linearVelocity);
setOrientation(newOrientation);
setRotation(newOrientation * MathUtils.radiansToDegrees);
}
}
}
@Override
public Vector2 getPosition() {
return position;
}
@Override
public float getOrientation() {
return (float) Math.toRadians(getRotation());
}
@Override
public void setOrientation(float orientation) {
setRotation((float) Math.toDegrees(orientation));
}
@Override
public Vector2 getLinearVelocity() {
return linearVelocity;
}
@Override
public float getAngularVelocity() {
return angularVelocity;
}
@Override
public float getBoundingRadius() {
return boundingRadius;
}
@Override
public boolean isTagged() {
return tagged;
}
@Override
public void setTagged(boolean tagged) {
this.tagged = tagged;
}
@Override
public float getZeroLinearSpeedThreshold() {
return 0.1f;
}
@Override
public void setZeroLinearSpeedThreshold(float value) {
// no-op
}
@Override
public float getMaxLinearSpeed() {
return maxLinearSpeed;
}
@Override
public void setMaxLinearSpeed(float maxLinearSpeed) {
this.maxLinearSpeed = maxLinearSpeed;
}
@Override
public float getMaxLinearAcceleration() {
return maxLinearAcceleration;
}
@Override
public void setMaxLinearAcceleration(float maxLinearAcceleration) {
this.maxLinearAcceleration = maxLinearAcceleration;
}
@Override
public float getMaxAngularSpeed() {
return maxAngularSpeed;
}
@Override
public void setMaxAngularSpeed(float maxAngularSpeed) {
this.maxAngularSpeed = maxAngularSpeed;
}
@Override
public float getMaxAngularAcceleration() {
return maxAngularAcceleration;
}
@Override
public void setMaxAngularAcceleration(float maxAngularAcceleration) {
this.maxAngularAcceleration = maxAngularAcceleration;
}
public Vector2 newVector() {
return new Vector2();
}
@Override
public float vectorToAngle(Vector2 vector) {
return (float) Math.atan2(-vector.x, vector.y);
}
@Override
public Vector2 angleToVector(Vector2 outVector, float angle) {
outVector.x = -(float) Math.sin(angle);
outVector.y = (float) Math.cos(angle);
return outVector;
}
@Override
public Location<Vector2> newLocation() {
return null; // Implement if needed
}
}
SteeringActor 类是一个实现了 Steerable<Vector2> 接口的角色类,能够应用 AI steering behaviors 来控制自身运动。下面是类中各个部分的详细解析:
类继承和接口实现
public class SteeringActor extends Sprite implements Steerable<Vector2>
– 继承 Sprite: SteeringActor 是一个能够在 2D 平面中渲染的图像实体。 – 实现 Steerable<Vector2> 接口: 表示该类支持方向操控和运动行为控制。
成员变量
private Vector2 position;
private Vector2 linearVelocity;
private float angularVelocity;
private float boundingRadius;
private boolean tagged;
private float maxLinearSpeed;
private float maxLinearAcceleration;
private float maxAngularSpeed;
private float maxAngularAcceleration;
private boolean independentFacing;
private SteeringBehavior<Vector2> steeringBehavior;
private SteeringAcceleration<Vector2> steeringOutput;
– 位置和运动:position 保存当前坐标,linearVelocity 和 angularVelocity 记录线性和角速度。 – 边界半径:用于碰撞检测的 boundingRadius。 – 标记状态:tagged 用于指示对象是否被标记,可用于群体行为。 – 运动限制:maxLinearSpeed、maxLinearAcceleration、maxAngularSpeed 和 maxAngularAcceleration 限制角色的速度和加速度。 – 独立朝向:independentFacing 确定是否独立于运动方向来设置朝向。 – AI 行为:steeringBehavior 持有 AI steering 行为的实例,而 steeringOutput 是计算结果。
构造方法
public SteeringActor(Texture texture)
public SteeringActor(Texture texture, Vector2 initialPosition)
– 初始化:构造方法初始化各种运动相关的变量,并设置纹理。第二个构造方法还允许直接定位初始位置。
核心方法
setSteeringBehavior
public void setSteeringBehavior(SteeringBehavior<Vector2> steeringBehavior)
– 设置行为:用于配置角色的AI steering行为。
applySteering
public void applySteering(float deltaTime)
– 应用运动学: – 根据当前的 steeringBehavior 计算得到 steeringOutput。 – 结合 linearVelocity 更新位置信息,通过 deltaTime 确保时间步长一致。 – 当 independentFacing 为 true 时,根据线速度调整朝向。
Steerable 接口实现
位置信息
– getPosition / getOrientation / setOrientation:处理实体的当前状态及其朝向。
速度信息
– getLinearVelocity / getAngularVelocity:获取当前速度信息。
碰撞半径
– getBoundingRadius:提供碰撞检测使用的对象半径。
标记状态
– isTagged / setTagged:用于获取和设置实体是否处于标记状态。
速度限制
– getMaxLinearSpeed / setMaxLinearSpeed:最大线速度。 – getMaxLinearAcceleration / setMaxLinearAcceleration:最大线性加速度。 – getMaxAngularSpeed / setMaxAngularSpeed:最大角速度。 – getMaxAngularAcceleration / setMaxAngularAcceleration:最大角加速度。
映射转换
– vectorToAngle / angleToVector:用于处理运动向量和方向角的转换。
其他方法
– newVector: 返回新的 Vector2 实例,用于创建新的向量实例。 – newLocation: 返回 null,需要时可以实现以支持具体位置的创建。
这一类主要处理角色的运动方向和速度,通过结合 libGDX 的 graphics 和 AI 库来进行角色状态的更新和显示。角色的行为通过 Steering 类实现的不同逻辑来定义,从而实现各种智能行为建模如寻路、避障、避开群体等。
完整代码:
package com.mygdx.game.steering;
import com.badlogic.gdx.ApplicationAdapter;
import com.badlogic.gdx.Gdx;
import com.badlogic.gdx.ai.steer.behaviors.Arrive;
import com.badlogic.gdx.graphics.GL20;
import com.badlogic.gdx.graphics.OrthographicCamera;
import com.badlogic.gdx.graphics.g2d.Batch;
import com.badlogic.gdx.graphics.g2d.SpriteBatch;
import com.badlogic.gdx.math.Vector2;
import com.badlogic.gdx.utils.viewport.ExtendViewport;
import com.badlogic.gdx.utils.viewport.Viewport;
import com.badlogic.gdx.ai.steer.SteeringBehavior;
import com.badlogic.gdx.ai.steer.behaviors.Seek;
import com.badlogic.gdx.graphics.Texture;
public class SteeringBehaviorExample extends ApplicationAdapter {
private static final float MAX_FORCE = 1f;
private static final float MAX_VELOCITY = 100f;
private Batch batch;
private Texture characterTexture;
private OrthographicCamera camera;
private Viewport viewport;
private SteeringActor character;
private SteeringActor target;
@Override
public void create() {
batch = new SpriteBatch();
characterTexture = new Texture("character.png");
camera = new OrthographicCamera();
viewport = new ExtendViewport(1080, 920, camera);
character = new SteeringActor(characterTexture);
character.setMaxLinearSpeed(MAX_VELOCITY);
character.setMaxLinearAcceleration(MAX_FORCE);
Vector2 targetPosition = new Vector2(100, 100);
target = new SteeringActor(new Texture("target.png"), targetPosition);
character.setSize(64, 64);
target.setSize(64, 64);
// 使用 Arrive 行为替代 Seek 行为
SteeringBehavior<Vector2> arriveBehavior = new Arrive<>(character, target)
.setArrivalTolerance(0.001f) // 设置到达目标的容忍距离
.setDecelerationRadius(20) // 在此半径内开始减速
.setTimeToTarget(0.1f); // 控制减速响应速度
character.setSteeringBehavior(arriveBehavior);
}
@Override
public void render() {
Gdx.gl.glClear(GL20.GL_COLOR_BUFFER_BIT);
character.applySteering(Gdx.graphics.getDeltaTime());
batch.setProjectionMatrix(camera.combined);
batch.begin();
character.draw(batch);
target.draw(batch);
batch.end();
}
@Override
public void resize(int width, int height) {
viewport.update(width, height);
}
@Override
public void dispose() {
batch.dispose();
characterTexture.dispose();
}
}
SteeringBehaviorExample 类是一个使用 libGDX 框架构建的示例应用程序,演示了经典的 AI Steering 行为,在这里实现了一个角色到达目标点的行为。以下是这个类的完整解析:
类定义和成员变量
public class SteeringBehaviorExample extends ApplicationAdapter {
private static final float MAX_FORCE = 1f;
private static final float MAX_VELOCITY = 100f;
private Batch batch;
private Texture characterTexture;
private OrthographicCamera camera;
private Viewport viewport;
private SteeringActor character;
private SteeringActor target;
– ApplicationAdapter: 继承自 ApplicationAdapter,这是 libGDX 提供的一个实现 ApplicationListener 接口的简易基类。 – 常量: MAX_FORCE 和 MAX_VELOCITY 分别代表角色的最大加速度和最大速度。 – Batch: 用于批量渲染 2D 图形的工具。 – Texture: 角色的纹理。 – OrthographicCamera: 传统的正交摄像机,用于2D渲染。 – Viewport: 负责控制显示区域和坐标变换。 – SteeringActor: 自定义的可动角色,包含角色和目标。
create() 方法
@Override
public void create() {
batch = new SpriteBatch();
characterTexture = new Texture(“character.png”);
camera = new OrthographicCamera();
viewport = new ExtendViewport(1080, 920, camera);
character = new SteeringActor(characterTexture);
character.setMaxLinearSpeed(MAX_VELOCITY);
character.setMaxLinearAcceleration(MAX_FORCE);
Vector2 targetPosition = new Vector2(100, 100);
target = new SteeringActor(new Texture(“target.png”), targetPosition);
character.setSize(64, 64);
target.setSize(64, 64);
SteeringBehavior<Vector2> arriveBehavior = new Arrive<>(character, target)
.setArrivalTolerance(0.001f)
.setDecelerationRadius(20)
.setTimeToTarget(0.1f);
character.setSteeringBehavior(arriveBehavior);
}
– 初始化资源: SpriteBatch 和 Texture 是渲染基础元素。 – 摄像机和视口: 设置了一个正交摄像机和伸缩视口以适应不同屏幕尺寸。 – 角色配置: 创建 SteeringActor 角色并设置其最大速度和加速度。 – 目标配置: 创建目标角色并设定初始位置。 – Arrive 行为: 配置 Arrive 行为用于角色,替代了传统的 Seek 行为。 – setArrivalTolerance: 设置停止的容忍阈值。 – setDecelerationRadius: 开始减速的距离。 – setTimeToTarget: 调节减速的响应时间。
render() 方法
@Override
public void render() {
Gdx.gl.glClear(GL20.GL_COLOR_BUFFER_BIT);
character.applySteering(Gdx.graphics.getDeltaTime());
batch.setProjectionMatrix(camera.combined);
batch.begin();
character.draw(batch);
target.draw(batch);
batch.end();
}
– 清屏: 使用 glClear 清除屏幕,使渲染帧干净。 – 应用行为: 调用 applySteering 来更新角色状态。 – 渲染: 批量绘制角色和目标。
resize() 方法
@Override
public void resize(int width, int height) {
viewport.update(width, height);
}
– 视口调整: 调用 viewport.update 以适应窗口大小变化,确保图形正确缩放。
dispose() 方法
@Override
public void dispose() {
batch.dispose();
characterTexture.dispose();
}
– 资源清理: 释放批处理和纹理资源以防止内存泄漏。
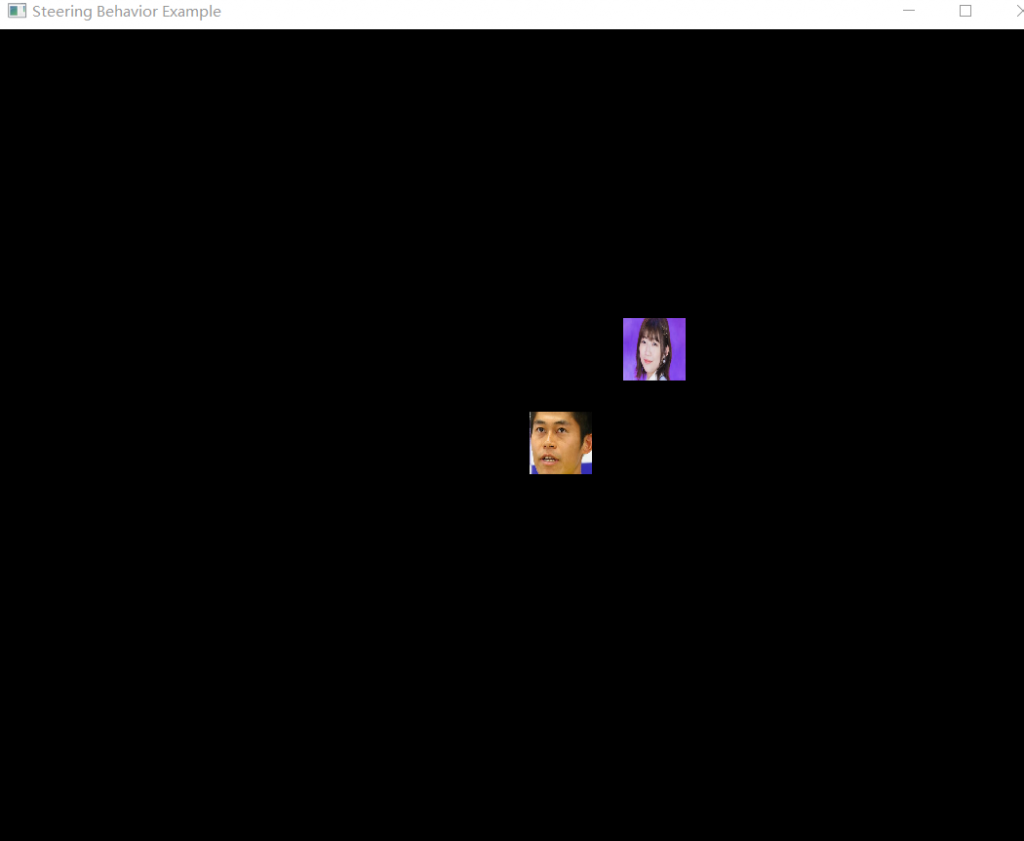
总结
SteeringBehaviorExample 类通过创建并配置 SteeringActor 对象以及其 Arrive 行为,实现简单的角色运动逻辑。该类展现了libGDX结合gdx-ai库的基本用法,是一个良好的入门示例,可帮助开发者理解如何在2D游戏场景中实现 AI 操控的运动行为什么。
运行结果:
8.6 消息处理(代码在myMessage包下)
消息处理在游戏中是非常重要的,比如说一个玩家攻击npc,这个时候就要传送一个attack的信息从玩家给到npc,同时npc拿到这个信息会进行逃跑或者反击处理,消息传递的过程中可以给其附加消息,就比如说当玩家带枪去攻击npc的时候,npc就只能逃跑
- 消息定义
首先,你需要定义消息的类型。在游戏中,消息通常用枚举类型来表示。
public enum MessageType {
ATTACK,
DEFEND,
PATROL
}
- 消息监听器和派发器
接下来,设置消息监听器(一个可以接收消息的组件)和消息派发器(负责发送消息的对象)。
import com.badlogic.gdx.ai.msg.*;
public class AIEntity implements Telegraph {
private String name;
public AIEntity(String name) {
this.name = name;
}
@Override
public boolean handleMessage(Telegram msg) {
MessageType messageType = MessageType.values()[msg.message];
switch (messageType) {
case ATTACK:
System.out.println(name + " received a ATTACK message with extra info: " + msg.extraInfo);
break;
case DEFEND:
System.out.println(name + " received a DEFEND message with extra info: " + msg.extraInfo);
break;
case PATROL:
System.out.println(name + " received a PATROL message with extra info: " + msg.extraInfo);
break;
default:
return false;
}
return true;
}
}
public class AIDemo {
public static void main(String[] args) {
// 创建实体和消息派发器
AIEntity entity1 = new AIEntity(“Entity1”);
AIEntity entity2 = new AIEntity(“Entity2”);
MessageDispatcher dispatcher = new MessageDispatcher();
// 注册实体到消息派发器
dispatcher.addListener(entity1, MessageType.ATTACK.ordinal());
dispatcher.addListener(entity2, MessageType.DEFEND.ordinal());
dispatcher.addListener(entity2, MessageType.PATROL.ordinal());
// 发送消息
dispatcher.dispatchMessage(MessageType.ATTACK.ordinal());
dispatcher.dispatchMessage(entity1, entity2, MessageType.PATROL.ordinal(), "ExtraInfo", false);
}
}
代码说明
- Telegraph 接口:
AIEntity实现了Telegraph接口,使其能够接收消息。handleMessage方法是处理收到消息的地方。 - MessageDispatcher:
MessageDispatcher是负责消息发送的组件。它可以直接发送消息给指定的接收者,或广播消息给所有注册了监听器的实体。 - 消息发送和接收: – 注册监听器:使用
addListener方法来规定哪些实体对哪些消息感兴趣,此处通过MessageType的枚举索引来注册监听器。 – 发送消息:通过dispatchMessage方法发送消息。消息可以包括一个额外的信息体(如"ExtraInfo"),以便接收者利用。 - handleMessage: 接收到消息后,根据消息类型进行相应的操作。此处通过日志输出来模拟游戏中不同的响应行为。
参数解析
dispatcher.dispatchMessage(entity1, entity2, MessageType.PATROL.ordinal(), “ExtraInfo”, false);
entity1(Telegraph sender): – 这是消息的发送者。它是一个实现了Telegraph接口的对象。在游戏中,这通常是某个意识到需要触发事件或进行通信的角色或系统。entity2(Telegraph receiver): – 这是消息的接收者。它也是一个实现了Telegraph接口的对象。这个对象会被通知有消息到达并负责处理这个消息。如果接收者为null,则消息会被广播给所有注册了该消息类型的监听器。MessageType.PATROL.ordinal()(int msg): – 这是消息的类型。MessageType是一个枚举,PATROL是其中的一个枚举常量。使用ordinal()方法将枚举常量转化为其枚举定义中的整数顺序(通常从 0 开始)。"ExtraInfo"(Object extraInfo): – 这是附加信息,随同消息一起发出。可以是任何对象,用于传递额外的数据或上下文,以便接收者理解消息的意图或具体内容。false(boolean needsReturnReceipt): – 这个参数表示是否需要消息回执(return receipt)。false意味着不要求发送消息的确认回执,大多数情况下用于简单的单向通知。
运行结果如下:
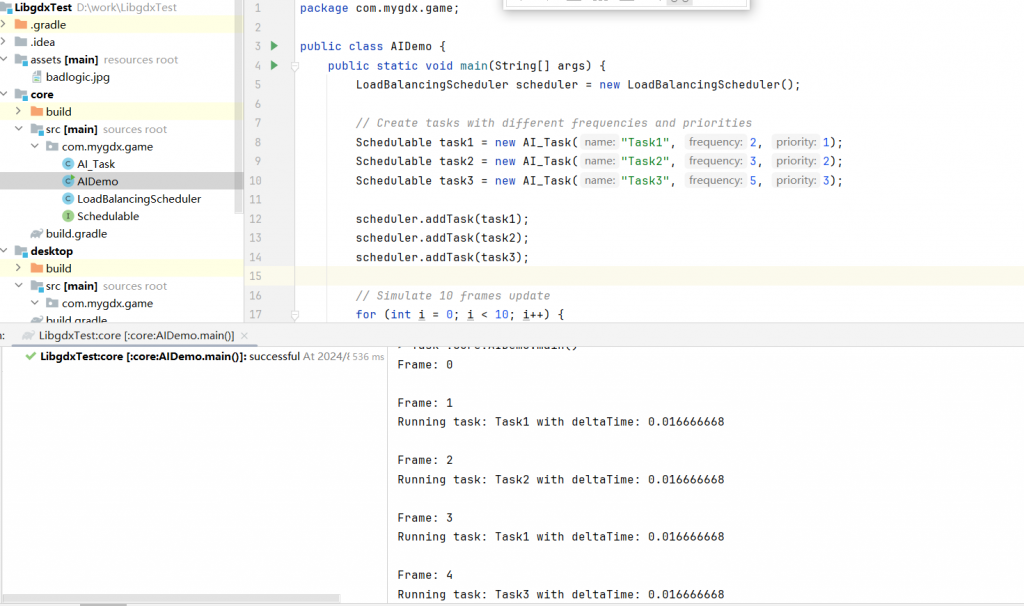
8.7 调度(代码在LibgdxTest项目的core的game包下的)
下面是一个示例代码,演示了如何使用简单的任务调度系统来进行 AI 任务的分配和调度。此例子中,我们创建了一个基于频率的任务调度器,并为多个任务设置频率和优先级。当调度器在每帧更新时,它将根据这些参数来选择和运行任务。
示例代码
import java.util.ArrayList;
import java.util.List;
import java.util.PriorityQueue;
import java.util.Queue;
interface Schedulable {
void runTask(float deltaTime);
int getFrequency();
int getPriority();
}
class AI_Task implements Schedulable {
private String name;
private int frequency;
private int priority;
public AI_Task(String name, int frequency, int priority) {
this.name = name;
this.frequency = frequency;
this.priority = priority;
}
@Override
public void runTask(float deltaTime) {
System.out.println("Running task: " + name + " with deltaTime: " + deltaTime);
}
@Override
public int getFrequency() {
return frequency;
}
@Override
public int getPriority() {
return priority;
}
}
class LoadBalancingScheduler {
private List<Schedulable> tasks = new ArrayList<>();
private Queue<SchedulerTask> taskQueue = new PriorityQueue<>();
private int frameCounter = 0;
public void addTask(Schedulable task) {
tasks.add(task);
}
public void update(float deltaTime) {
frameCounter++;
taskQueue.clear();
for (Schedulable task : tasks) {
if (frameCounter % task.getFrequency() == 0) {
taskQueue.add(new SchedulerTask(task, deltaTime));
}
}
while (!taskQueue.isEmpty()) {
SchedulerTask schedulerTask = taskQueue.poll();
schedulerTask.run();
}
}
private static class SchedulerTask implements Comparable<SchedulerTask> {
private Schedulable task;
private float deltaTime;
public SchedulerTask(Schedulable task, float deltaTime) {
this.task = task;
this.deltaTime = deltaTime;
}
@Override
public int compareTo(SchedulerTask o) {
return Integer.compare(o.task.getPriority(), this.task.getPriority());
}
public void run() {
task.runTask(deltaTime);
}
}
}
public class AIDemo {
public static void main(String[] args) {
LoadBalancingScheduler scheduler = new LoadBalancingScheduler();
// Create tasks with different frequencies and priorities
Schedulable task1 = new AI_Task(“Task1”, 2, 1);
Schedulable task2 = new AI_Task(“Task2”, 3, 2);
Schedulable task3 = new AI_Task(“Task3”, 5, 3);
scheduler.addTask(task1);
scheduler.addTask(task2);
scheduler.addTask(task3);
// Simulate 10 frames update
for (int i = 0; i < 10; i++) {
System.out.println("Frame: " + i);
scheduler.update(1.0f / 60.0f); // Assuming 60 FPS
System.out.println();
try {
Thread.sleep(1000 / 60); // Simulate frame duration
} catch (InterruptedException e) {
e.printStackTrace();
}
}
}
}
代码说明
- Schedulable Interface: 定义了一些必须实现的方法,以便任务可以被调度。每个任务都有频率和优先级。
- AI_Task Class: 实现
Schedulable接口,为任务提供了名称、频率和优先级。这些任务可以被调度系统使用。 - LoadBalancingScheduler Class: 管理
Schedulable任务,并根据“频率”和“优先级”决定哪些任务将在当前帧上运行。 - SchedulerTask: 内部类,用于包装任务,并根据其优先级进行排序。
- AIDemo Class: 包含主方法,演示了如何创建任务,并将它们添加到调度系统中。程序模拟了 10 帧的游戏循环。
解释:
代码结构
- 接口
Schedulable: – 这是一个接口,定义了需要实现的方法。 –runTask(float deltaTime): 这个方法需要执行任务的逻辑。 –getFrequency(): 获取任务执行的频率。 –getPriority(): 获取任务的优先级。 - 类
AI_Task: – 实现了Schedulable接口。 – 字段name,frequency,priority: 分别表示任务的名称、执行频率和优先级。 – 构造函数AI_Task(String name, int frequency, int priority): 初始化任务的名称、频率和优先级。 – 方法runTask(float deltaTime): 打印任务执行的日志。 – 方法getFrequency()和getPriority(): 返回任务的频率和优先级。 - 类
LoadBalancingScheduler: – 管理和调度一组Schedulable任务。 –tasks: 存储所有添加的任务。 –taskQueue: 基于优先级的任务队列。 –frameCounter: 记录当前帧计数,用于决定哪些任务需要在当前帧中执行。 – 方法addTask(Schedulable task): 向调度器添加一个任务。 – 方法update(float deltaTime): 每帧调用一次,用于调度和处理任务。 – 清空taskQueue。 – 遍历所有任务,检查是否需要在当前帧执行(frameCounter % frequency == 0)。 – 按优先级将需要运行的任务添加到taskQueue。 – 执行所有在队列中的任务。
– 内部类 SchedulerTask: – 包装 Schedulable 对象,附带 deltaTime 信息。 – 实现 Comparable<SchedulerTask> 接口,用于在队列中按优先级排序。 – compareTo(SchedulerTask o): 将任务按优先级倒序(优先级值高的任务优先执行)。 – 方法 run(): 执行封装的任务。
- 类
AIDemo: – 包含主方法main(String[] args)。 – 创建和配置任务: – 实例化三个不同频率和优先级的任务task1,task2,task3。 – 将任务添加到LoadBalancingScheduler中。 – 模拟帧更新: – 运行一个循环,模拟 10 帧。 – 每一帧调用scheduler.update(1.0f / 60.0f)执行任务,假设每秒 60 帧。 – 使用Thread.sleep(1000 / 60)模拟帧的持续时间。
代码中的注意事项 – 使用优先级队列(PriorityQueue)自动管理任务的执行顺序。 – 每个任务根据其频率控制是否在当前帧执行。 – 如果任务的频率因数较大,则任务执行频率更低。 – 使用优先级实现任务的时间分配策略,高优先级任务获得更多处理机会。 – LoadBalancingScheduler 可以在游戏复杂时方便地管理多个任务,保持帧率稳定。
运行结果为: